导读 加州大学圣地亚哥分校的工程师开发了一种制造紧凑、便携和多功能软机器人的方法。这一进展是通过制造一种柔性管状致动器来实现的,该致动器
加州大学圣地亚哥分校的工程师开发了一种制造紧凑、便携和多功能软机器人的方法。这一进展是通过制造一种柔性管状致动器来实现的,该致动器的运动是电动控制的,使其易于与小型电子元件集成。
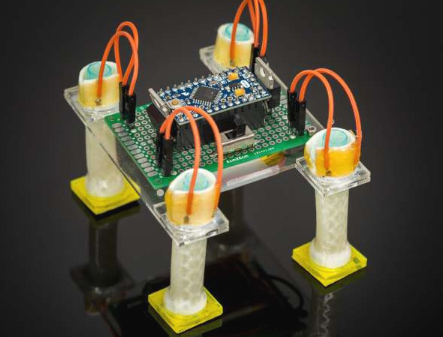
作为概念的证明,工程师们使用这些新的致动器来构建一个软电池供电的机器人,它可以在平坦的表面上行走并自由移动物体。他们还建造了一个柔软的抓手,可以抓取和拾取小物体。
由加州大学圣地亚哥分校机械与航空工程教授蔡胜强领导的研究小组于10月11日在《科学进展》发表了这项研究。
大多数软致动器的问题是它们有巨大的设置。那是因为它们的运动是由泵送空气或液体通过内室来控制的。因此,制造带有这种致动器的机器人需要将其连接到泵、大型电源和其他特殊设备上。
在目前的研究中,加州大学圣地亚哥分校的工程师已经创造了由电控制的软执行器。蔡说:“这一功能使我们的管状致动器与大多数低成本商用电子设备和电池兼容。”
致动器由机器人人造肌肉的材料制成,这种材料被称为液晶弹性体。它们由嵌在弹性聚合物网络中的液晶分子组成。这些材料的独特之处在于,它们响应热或电刺激而改变形状、移动和收缩,类似于肌肉响应神经细胞信号而收缩。
为了构造每个致动器,工程师将三根电热丝夹在两层液晶弹性体薄膜之间。然后将材料卷成一根管子,预拉伸并暴露在紫外线下。
每根电热丝都可以独立控制,使管道向六个不同的方向弯曲。当电流通过一根或两根电线时,它会加热管道的一部分,并使其向这些电线的方向弯曲。当电流通过所有三根导线传输时,整个管子会收缩,从而缩短长度。关闭电源后,灯会慢慢冷却,恢复到原来的形状。